
In order to further improve the safety of driving, the paper introduces the design of the vehicle intelligent safety vehicle based on INEMO. The system collects the information during the driving process of the vehicle, analyzes the unsafe factors and makes an early warning, and prompts the driver's operation. And the driving environment is analyzed by sharing information with surrounding vehicles, and if there is an unsafe vehicle, a warning is issued in time.
I. Project Overview
During the driving process, some information about the unsafe factors is difficult for the driver to capture, such as the temperature and pressure changes of the tires. For the novice driver, when the car is turning or driving on uneven roads, due to operation Unskilled and prone to accidents. Some accidents are caused by the driver's fatigue driving and unable to make judgments about the surrounding vehicle driving environment. After the accident, further loss of life and property was caused by the lack of timely assistance.

Therefore, in order to further improve the safety of driving, this paper introduces the design of the vehicle intelligent safety vehicle based on INEMO. The system detects the driving situation of the vehicle and wirelessly communicates with the surrounding vehicles equipped with the system and performs data sharing, thereby evaluating and analyzing the possible unsafe factors of the vehicle, thereby providing the driver with reference information and being unsafe. The driving behavior makes an alarm, and the system can also transmit data with other public management platforms or personal mobile phones through GSM, etc., so that more information and services can be provided for the driver. In addition, the system can store information on the driving of the vehicle, which can be used as a driving simulation and accident analysis, etc., and can be regarded as a "black box" of the automobile.
Second, the demand analysis
2.1 Functional requirements
The system function can be divided into the following three aspects
1) Self-vehicle driving state detection: By detecting the driving condition of the vehicle, including the vehicle speed, the linear acceleration of the vehicle, the vertical acceleration (ie, the road surface condition), the turning condition, the tire temperature and pressure, the atmospheric temperature and pressure inside and outside the vehicle, and the like. Provide drivers with driving tips to avoid improper operation. All data can be recorded and stored.
2) Vehicle and car interconnection information sharing: The system detects whether there is a same system within a certain range, shares information with it, analyzes the driving state of the vehicle, alarms for unsafe driving and hidden dangers, maintains the safety distance of the vehicle, and prevents rear-end collision. The accident happened.
3) Handling of accidents: Once an accident occurs, the driver can call the police and ask for help (mobile phone text message) by pressing one button. If the driver cannot take the initiative to ask for help, the system should have the function of automatically discriminating the accident and send out the location of the accident. .
2.2 Performance standards
According to the system function requirements, the following standards are proposed.
1) In the aspect of car information detection
1. Tire temperature and pressure detection, the acquisition frequency is 10Hz, and all four tires must be tested, requiring real-time accuracy.
2. The speed of the vehicle can be calculated with an error of no more than 2km/h.
3. Detect the angle of the car when turning, calculate the turning radius, and make a judgment on whether the car is rollover or drift.
4. Guarantee to record 24-hour driving information (long storage interval) and detailed short interval storage of 10 minutes.
2) Vehicle and car interconnection
Ensure reliable communication, and the frequency of information exchange is more than 10 times per second.
3) Accident handling
1. After the accident, the system should continue to work reliably and be able to issue information in a timely and accurate manner.
2. Help information can be sent continuously until receiving assistance
3. Automatically determine the false alarm rate of the accident program is below 10%
Third, the program design
3.1 System function realization principle
The system can be divided into five main modules: sensor acquisition and processing; vehicle and vehicle communication and vehicle network communication; main processing and decision procedures; alarm, prompt interactive service interface; data storage and transmission.
The sensor collects the temperature and pressure of the four tires of the car and the atmosphere inside and outside the vehicle; the acceleration sensor can measure the linear acceleration and vertical acceleration of the car according to the installation position and direction, and obtain the driving and road conditions of the car; the gyroscope can measure the slope of the road surface. And the angle of the vehicle turning, etc. The main processing and determination module analyzes the current own vehicle driving information and other vehicle information, and makes a determination, and corresponding alarms and interface prompts are displayed according to the determination result. The system can store the collected and processed data and can transmit it to the host computer. Based on this information, the host computer software can completely simulate the travel path process before the vehicle, etc., for accident analysis and the like.

Figure 1: System hardware block diagram
3.2 Hardware Resource Configuration
1. Accessories circuit board: communication and storage circuit board: wireless interface (vehicle and car interconnection), GSM (information upload), serial port (for debugging), CAN (communication with car ECU), memory, etc.
2. Interface display circuit board: LCD12864 LCD, alarm, etc.
3. Main control board: circuit board based on microcontroller chip STM32F103RE
4. Sensor: LSM303DLH6, LY330ALH, LPR430A, digital temperature sensor ADT7420, pressure sensor
3.3 system software architecture
In the system software, there are the following subroutines
1. Sensor signal processing: Acquire analog signals such as angle, acceleration, temperature and pressure and process them into applicable parameter values.
2. Read other vehicle information: Read other detected vehicle information through an interface with the communication circuit board.
3. The main processing program mainly includes the tire temperature and pressure detection program, the program for judging the vehicle speed according to the road bump condition, and the determination of the turning distance according to the turning angle of the vehicle according to the program of the vehicle distance determination according to the driving situation of other vehicles. Procedures and procedures for determining whether an accident has occurred in the vehicle. If the preset judgment value is exceeded, the corresponding processing is performed.
4. Accident emergency procedure: If it is determined that the accident has an active alarm, pressing the alarm button also triggers the secondary procedure.
5. Prompt information: Important data after collection and processing can be displayed, as well as prompts for driver operation.
6. Alarm information: After the judgment program makes an alarm judgment, a voice prompt alarm or a Buzzer Alarm light is performed.
7. Information Record: Record recent detailed driving information, and process the data to ensure long-term recording.
The relationship between each subroutine is as shown
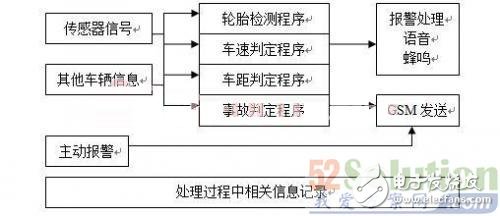
Figure 2: System Software Architecture
3.4 System Software Process
After the system is powered on, initialize each register and user variables, and then wait for the interrupt program.
The system program mainly includes three timing programs. The first timing program will read the sensor signal value and other vehicle information values, then process the data and save the result to a custom variable. The second timing program is the main processing program, and various determinations are made based on the value of the variable. If the decision is successful, the corresponding action program is executed directly. The third timing program is data logging and display, for refresh display of the screen interface, timing recording and updating of data.
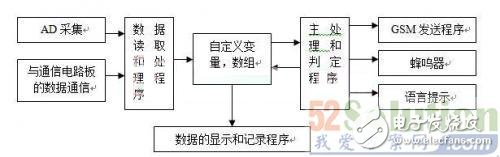
Figure 3: System Software Process
Speakers are one of the most common output devices used with computer systems. Some speakers are designed to work specifically with computers, while others can be hooked up to any type of sound system. Regardless of their design, the purpose of speakers is to produce audio output that can be heard by the listener.
Speakers are transducers that convert electromagnetic waves into sound waves. The speakers receive audio input from a device such as a computer or an audio receiver. This input may be either in analog or digital form. Analog speakers simply amplify the analog electromagnetic waves into sound waves. Since sound waves are produced in analog form, digital speakers must first convert the digital input to an analog signal, then generate the sound waves.
The sound produced by speakers is defined by frequency and amplitude. The frequency determines how high or low the pitch of the sound is. For example, a soprano singer's voice produces high frequency sound waves, while a bass guitar or kick drum generates sounds in the low frequency range. A Speaker System's ability to accurately reproduce sound frequencies is a good indicator of how clear the audio will be. Many speakers include multiple Speaker cones for different frequency ranges, which helps produce more accurate sounds for each range. Two-way speakers typically have a tweeter and a mid-range speaker, while three-way speakers have a tweeter, mid-range speaker, and subwoofer.
Speaker
Speaker System,Magnet Speaker Acoustic,Moving Coil Loudspeaker,Metal Frame Mylar Speaker
Jiangsu Huawha Electronices Co.,Ltd , https://www.hnbuzzer.com